Overview
Inanix produit son propre contrôleur de vol. Il est actuellement en version 0.98 mais ce wiki couvre également les versions précédentes.
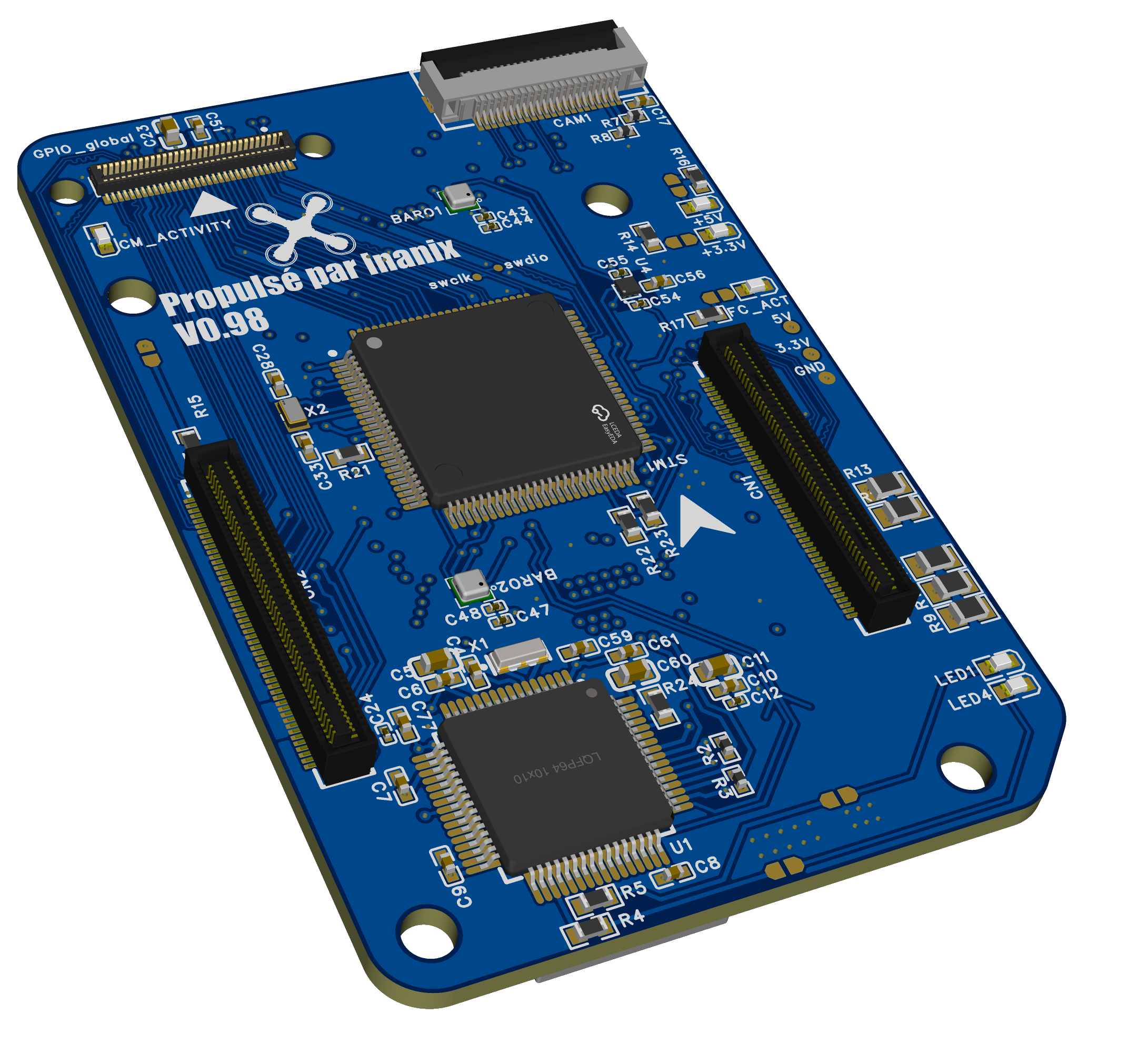
Spécifications
- Processeur
STM32H743VIT6 ARM (480MHz)
- Sensors
2x Bosch BMI270 (accel, gyro)
2x baromètre Bosch BMP390
1x compas Bosch BMM350
- Power
5V 4A BEC
3.3V 4A BEC
- Interfaces
3x UARTS
12x PWM
1x port I2C
2x ports MIPI CAM
2x connecteur 100 pins pour raspberry pi CM4
1x port µSD relié au compute module
Avertissement
Certaines interfaces nécessitent une ou des cartes supplémentaires pour être accessibles.
Avertissement
Le contrôleur comporte des connecteurs pour la liaison avec les autres cartes. La valeur maximale absolue donnée pour le nombre de branchements de ces connecteurs est 30. Toute manipulation excessive est donc à proscrire.
- Size and Dimensions
67x44.5x8.6mm

Connexion à la carte
La connexion au contrôleur de vol s’effectue de deux manières :
Par l’usb de la carte d’extension si vous en avez une.
En mavlink par la liaison série liée au compute module.
Si la carte est sous ardupilot, le baudrate est a 115200 par défaut. Sous PX4, il est a 57600.